


软极限设定功能是指将机器人的动作范围通过软件进行设定的功能,区别于使用挡块来作为硬限位(为检测机器人的工作范围而机械性设定的开关,称为限位开关。)。只有在示教模式下,且系统模式是管理模式及以上模式时,才会显示软限位设定画面。
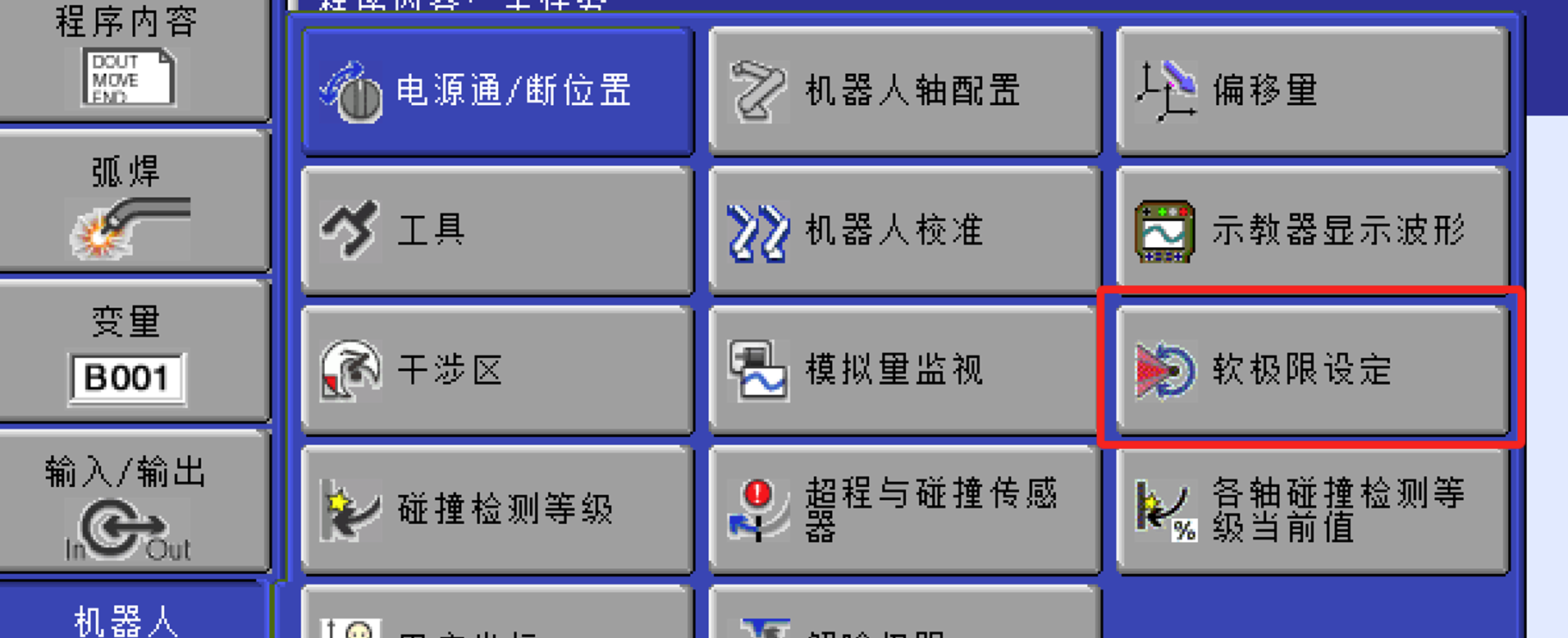
1. 选择主菜单中左侧栏的【机器人】。
2. 选择【设定软极限】。
–显示软极限设定画面。
3. 设定目标控制轴组(如果屏幕下方不显示【进入指定页】,则代表无外部轴,此项可忽略)。
–按下[翻页]或是选择对话框切换到目标控制轴组。
–使用选择对话框时,应选择【进入指定页】,选中目标控制轴组,按下[选择]。
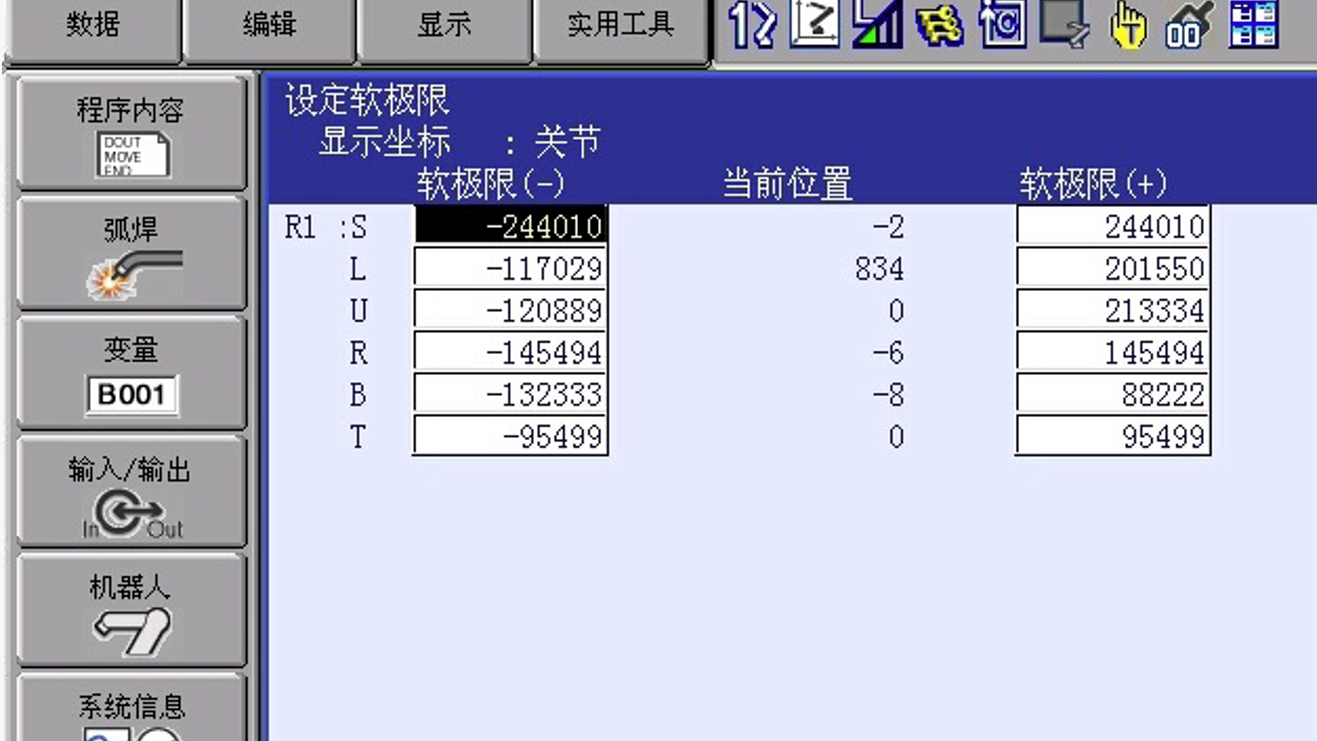
4. 移动光标到“ 软限位(+)” 或“ 软限位(-)” 的对象轴,按下[选择],输入“ 软限位(+)”“ 软限位(-)” 的数值,按下[回车]即可。

机器人出厂时,已经设置了合适的最大软极限范围,因此一般情况下如需修改软极限都是往缩小范围的方向进行修改,不能在出厂的基础上再扩大范围。
正常显示的软极限范围是以脉冲值来表示,如果需要更加直观的来描述范围,可以通过切换显示坐标系来查看各轴的软极限角度。操作如下所述:
1. 选择下拉菜单中的【显示】。
–显示【坐标切换】。
2. 选择【坐标切换】。
–显示坐标为脉冲时,机器人轴会更改为角度显示,基座轴会更改为距离显示,工装轴会根据其工装角度显示参数(S2C265 ~ 288) 的值,更改各轴的显示。
更改软极限值后,为了安全,必须通过程序操作确认动作范围。
1. 选择下拉菜单中的【数据】。
–显示【厂家初始值】。
2. 选择【厂家初始值】。
–显示确认对话框。
3. 选择“ 是”。
–所有显示轴的软极限都设定为机械极限。若选择“ 否”,则操作中止。
更多资讯:安川机器人
